

 QQ
QQ
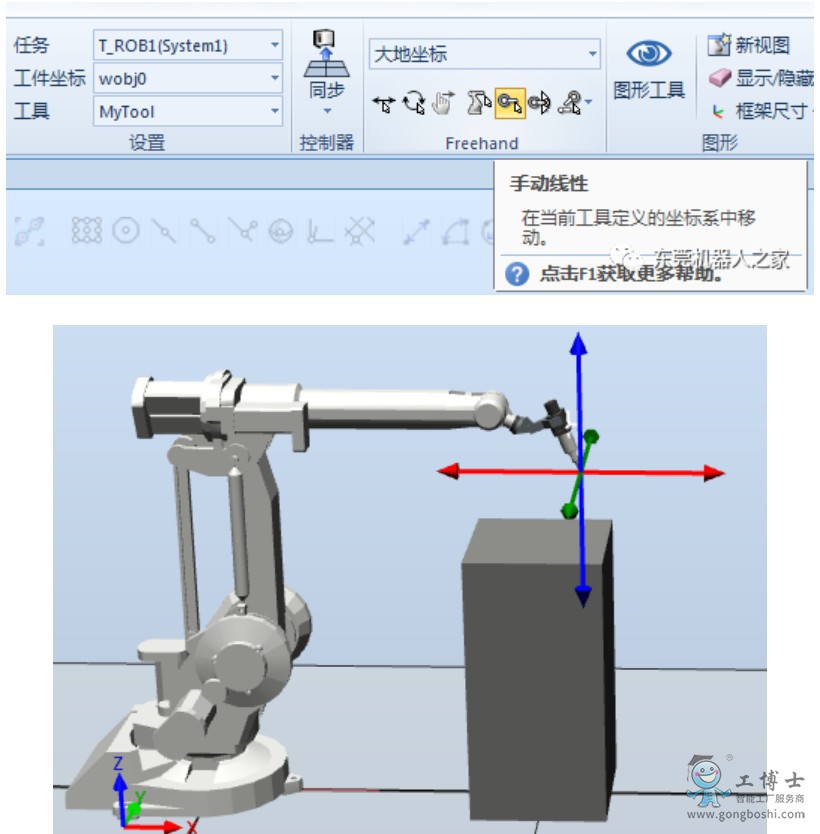
在机器人的手动控制中,除了单独控制机器人的六个轴之外,还能进行基于 X、Y、Z坐标的线性和重定位控制,其中线性控制将根据三个坐标进行线性移动,不改变机器人工具的姿态.

2.ABB机器人手动操纵-重定位运动
机器人的重定位运动是指机器人第六轴法兰盘上的工具 TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具 TCP点作姿态调整的运动。
重定位运动的运动方式也跟所选的坐标系有关,运动形式是基于所选择的坐标系原点围绕着 X、Y、Z轴进行顺时针旋转。
3.ABB机器人的坐标系
分为四种,分别为“大地坐标”、“基坐标”、“工具坐标”、“工件坐标”。
坐标系从一个称为原点的固定点通过轴定义平面或空间。
机器人目标和位置通过沿坐标系轴的测量来定位。
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。
图片
大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。它适用于微动控制、一般移动以及处理具有若干机器人或外轴移动机器人的工作站和工作单元。
基坐标系位于机器人基座。它是便于机器人从一个位置移动到另一个位置的坐标系。
工件坐标系与工件相关,通常是适于对机器人进行编程的坐标系。
工具坐标系定义机器人到达预设目标时所使用工具的位置。
默认工具(tool0)的 TPC点位于机器人工具安装法兰盘中心,下图坐标标示处。
上图为一MyTool工具示例,为方便打磨调点和路径走位的性,我们一般把 TCP点位置设于MyTool工具加工处。如上图。
TCP的设定原理如下:
1)首先在机器人工作范围内找一个的固定点作为参考点。
2)然后在工具上确定一个参考点作为 TCP位置(是工具的中心点)。
3)用之前介绍的手动操纵机器人的方法,去移动工具上的参考点,以四种以上不同的机器人姿态尽可能与固定点刚好碰上。
4)机器人通过三个位置点以上的位置数据计算求得 TCP的数据,然后TCP的数据就保存在 tooldata这个程序数据中被程序进行调用。
- 下一篇:ABB机器人MODBUS RTU通讯
- 上一篇:基于EGM的ROS控制ABB机器人
