

 QQ
QQ
ABB机器人“植入视觉”集成只为精益求精!
ABB机器人已经在工业生产中占据众多领域。它们用于处理重型部件、进行首次定位和高度重复的动作。同时它们可以始终如一地提供高质量和高可靠性。机器视觉系统长期以来用于让机器人“植入视觉”。 只有当相机和图像处理准确告诉机器人需要移动的位置时,机器手才能执行高精度夹持和定位动作。
ABB机器人集成视觉系统精益求精,堪称是目前先进的视觉工具,现已成为ABB机器人不可分割的一部分,可一周7天,一天24小时执行各种任务,对工人的经验以及编程时间要求降到低。 ABB机器人集成视觉系统得到Cognex®的助力,(推荐:ABB机器人配件服务运营商店)是目前先进的视觉系统,可在生产车间具挑战性的条件下工作。该视觉系统直观且易操作,能够自动选择特征并拟出参数,使配置时间小化,在具挑战性的视觉应用中亦能取得极为可靠的成果。
操作与配置:
在菜单栏下方工具栏里有相机和视频功能,在相机拍照图标旁边是选择相机的下拉列表。
选择好相机后点击拍照图标可以实现拍照,可以在显示窗里看到拍照结果。视频模式也是类似,先选好相机然后点击视频,切换到视频模式下,可以在显示窗看到视频结果。在视频模式下载点击一次视频模式按钮来切换回普通模式。
首先,选择图片采集设备/图像采集卡,控件会自动搜索到可用的工业相机选择对应的相机。
第二步,选择视频格式。
第三步,点击工具栏第“ 个工具,运行进行拍照,拍照完成后可用在右边的窗体中看到拍照结果。
第四步,通过拍出的图片检查相机是否正确配置,如果选错相机会拍不到正确图片。
第五步,通过调整曝光时间、亮度和对比度参数,还可以通过调节外部光源、镜头的焦距和入光亮,来获得清晰的图像。
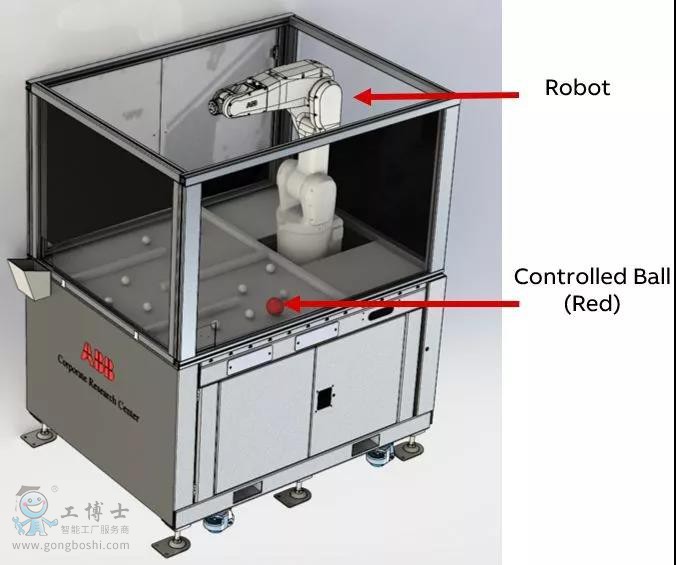
(ABB视觉伺服技术实现动态高效跟踪)
相机标定.上相机标定流程:
ABB机器人配件
(主界面→> [视觉标定1- [二 工站上相机标定]机器人用针做Tool 用于标定。
将标定结果保存至E:\自动化模拟工厂视觉系统\标定文件\相机1\路径下。
下相机标定流程
(主界面)→>[视觉标定]>(二工站下相机标定机器人用十字Mark 中心做Tool用于标定。
将标定结果保存至 E:\自动化模拟工厂视觉系统\标定文件\相机2\路径下。
标定界面标定界面注释:
1.选择4点进行标定。
2.点击mark进入标定时做模板的界面。
3.点击相机取图后才能进行2步骤,否则无法读取图片。
4. RunModel,即在当前取得的图像下运行模板,得到像素坐标点。
5.点击下拉框,选择相应的点将数据写入。
6.填写完4个点的像素坐标和机械坐标后,点击标定,即可从结果显示窗口观察到计算的误差。若误差过大,则需从新标定。
7.点击另存为,将标定后的文件保存至(8)中指定的路径后并重启,系统即可自动加载标定文件。
8.保存路径。
机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
