

 QQ
QQ
EGM的外部引导方式有5中,分别是:
EGMSetupAI-为EGM设置模拟输入信号;
EGMSetupAO-为EGM设置模拟输出信号;
EGMSetupGI-为EGM设置编组输入信号;
EGMSetupLTAPP-为EGM设置相应的LTAPP协议;
EGMSetupUC-为EGM设置UdpUc协议;
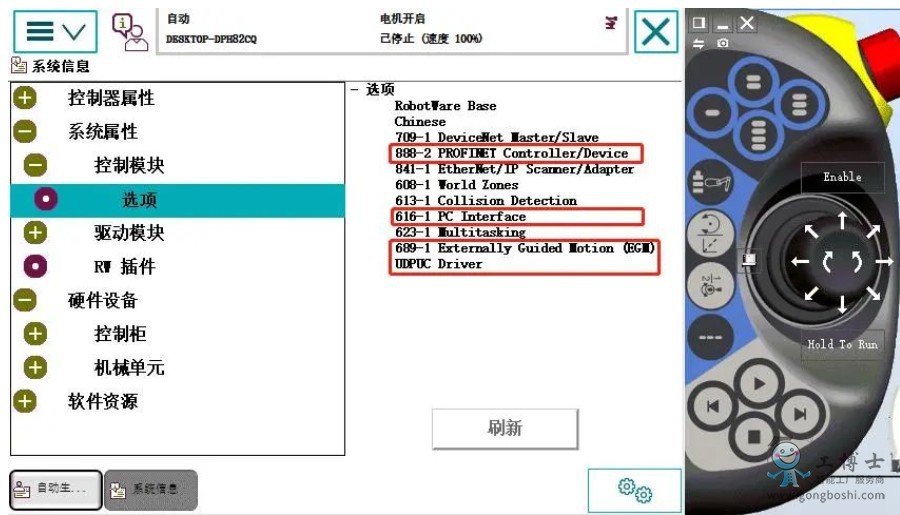
以上,模拟量及组信号需要连接PLC或者IO模块来提供信号,所以需要开通709-1,888-2,841-1等工业网络选项,LTAPP协议是使用通信协议LTAPP且类型为先行的OptSim传感器,并以该传感器作为数据来源(传感器)。UdpUc协议是与上位机通过UDP通讯来作为信号源引导机器人运动,需要开通616-1选项。
EGM提供了3种不同的特性:
EGM Position Stream:
EGM Position Stream仅可用于UDP通信,其能够定期发送机械单元(如机器人、定位器和导轨等)的机器人计划和实际的位置数据,通过 Google Protobuf的定义文件egm. proto来详细说明发送信息的具体内容,用户可在IRC5控制器的高优先级网络环境高达250Hz的稳定数据交换)下运行周期通信通道(UDP),且各运行任务必须配备一个通信通道。EGM Position Stream功能可与 EGM Position Guidance功能一同使用,应用示例如在激光头正在动态控制激光束的地方进行激光焊接(外部设备实施获取当前机器人的位置)等。
EGM Position Guidance:
EGM Position Guidance是为高级用户设计的,它通过绕过相关路径规划的方式为相关的机器人控制器提供了一个低级接口。
用户可用 EGM Position Guidance来高速读取相关运动系统的位置和向该系统高速写入位置(可达到每4ms一次,并伴随10~20ms的控制延退,具体的延取决于相关的机器人类型)。EGM Position Guidance会处理一切必要的滤波、引用项监控和状态事宜。状态事宜的处理包括程序启动停止和紧急停止等。
与其他外部运动控手段相比, EGM Position Guidance的主要优点在于较高的速率和较低的延时。从“写入一个新位置”到“该给定位置开始影响实际的机器人位置”之间的时间通常约为20ms。
EGM会直接进入相关的电机引用项生成过程,即机器人控制器不会提供任何路径规划,这意味着用户无法下令机器人移动到某个姿态目标点。用户既无法下令进行一次指令速度的移动,也无法下令进行一次应耗费指定时间的移动。如果要下令进行此类需要路径规划的移动,可使用 RAPID中的标准移动指令,即 MoveL和MoveJ等。
由于相关机器人控制器中的EGM绕过了路径规划,因此用户输入数据会直接创建相应的机器人路径,所以很重要的一点就是确保发送给机器人控制器的位置要尽量平顺。机器人会迅速对接收到的位置数据做出反应。
EGM Path Correction:
EGM Path Correction使用户可矫正一条已经编写好的机器人路径。用于测量实际路径的装置或传感器必须安装在相关机器人的工具栏上,且该装置或传感器必须能够校准相应的传感器框架坐标系。
基于EGM功能的实操
EGM Stream的实时数据输出
新建机器人的UDP配置:新建UC device.pdf(这个小工具可以用WIN10自带的步骤记录器,WIN+R输入psr.exe录制)
机器人RAPID:
EGM Guidance的外部引导
本次我们采用PLC发送模拟量值来操控机器人:
机器人RAPID:
上述,注意模拟量的正确创建,选择用合适的矫正框架,填写合适的笛卡尔坐标系收敛域值,容许的***大关节速度变化度数将直接影响EGM运行的速度及实时性。
PLC侧:
上述,因西门子PLC的特殊性,要注意高低字节的转换。
HMI侧:
整体调试效果:
视频为PLC发送模拟量引导EGM运动,而非RAPID运动指令,测试阶段只能单个数值演示。第二阶段接入上位机后可空间内自由运动,第三阶段加入视觉算法后可进行视觉引导机器人进行激光切割、熔焊等工艺。
