

 QQ
QQ
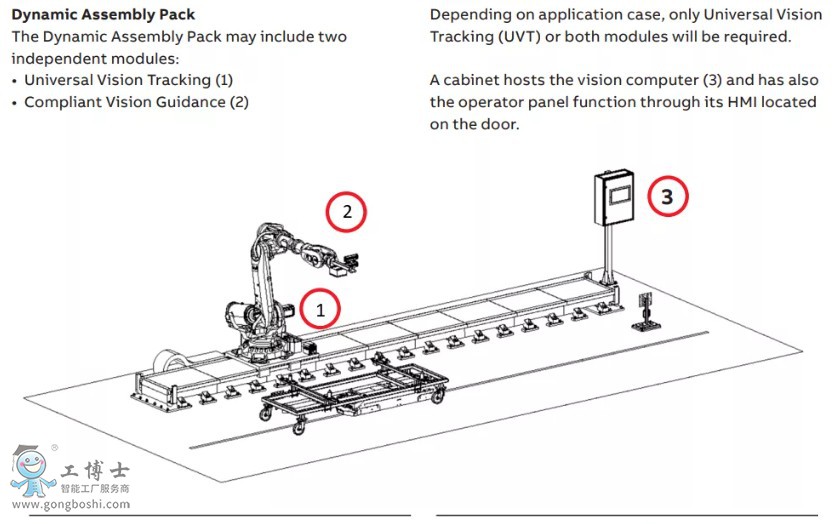
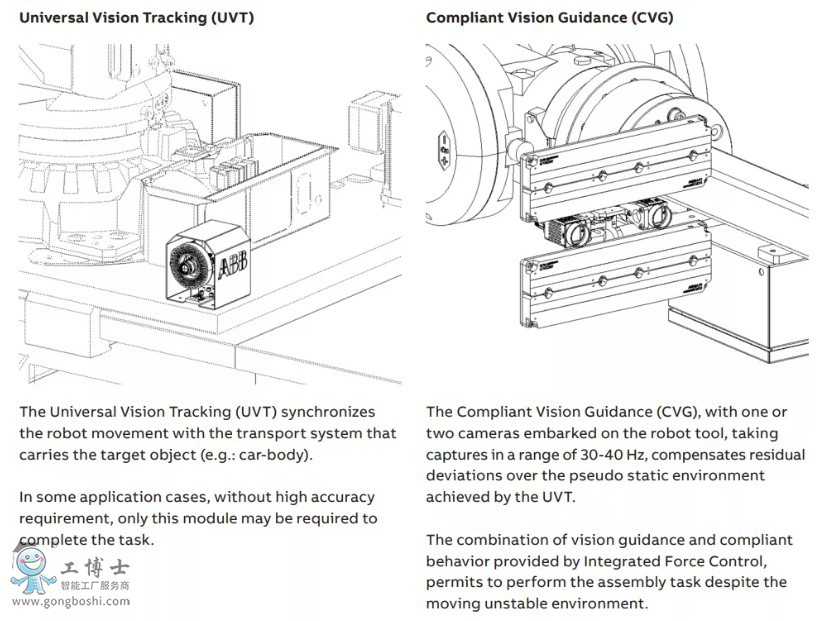
为此ABB创新型的推出了基于EGM(External Guide Motion)和力控的机器人随行装配,即机器人通过安装在导轨上的相机对车身上的特征进行跟踪(Universal Vision Tracking)并通过EGM方式引导机器人跟踪车身,也可选配下图中的2(即手部相机,Compliant Vision Guidance),对车身另一特征进行跟踪并消除导轨等外部引起的抖动。
ABB机器人在装配过程中,加入力控,使得装配更柔顺(即EGM的外部引导和力控同时使用)
更多资讯:ABB机器人
 产品分类
产品分类联系热线:18616599333 联系人:赵经理 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 ABB机器人配件服务运营商
