

 QQ
QQ
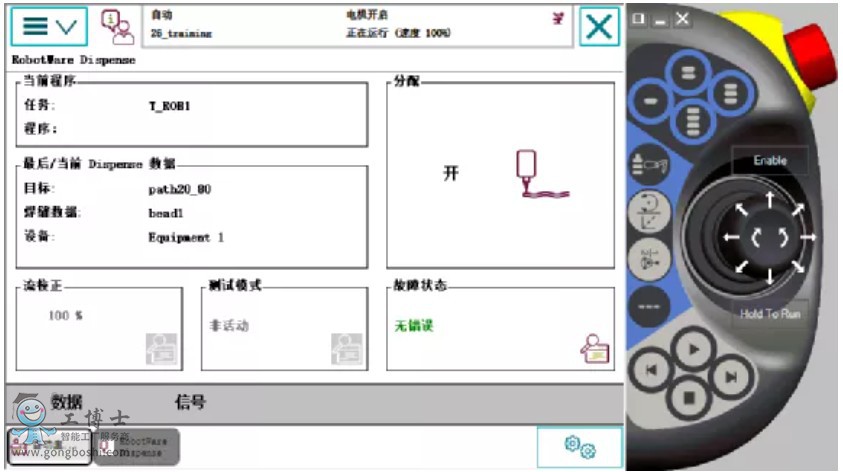
1.ABB机器人在进行涂胶作业时,可以使用Dispense涂胶包
2.机器人在涂胶时,可以实时显示当前的点位名称,beaddata和equipdata
3.关于涂胶指令,beaddata和equipdata,见涂胶指令与数据简介
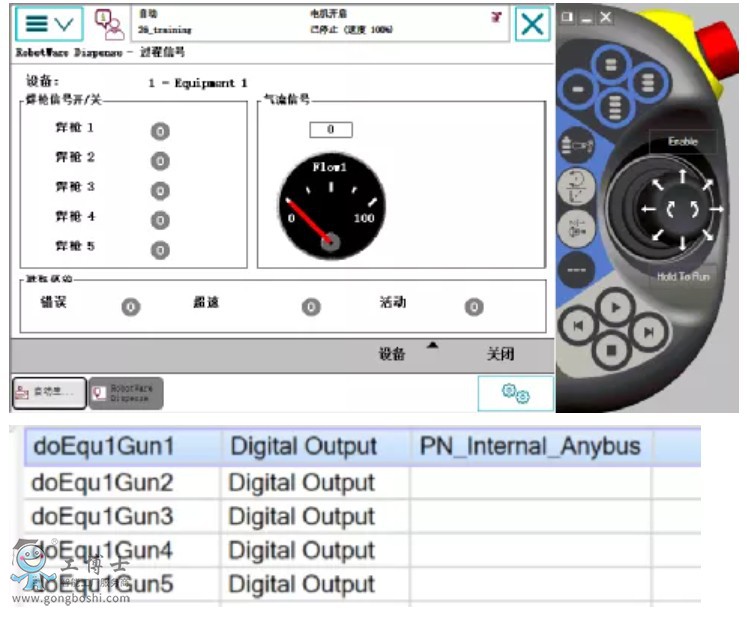
4.安装涂胶包的机器人,自动已经配置了若干信号,并将这些信号在PROCESS中进行了配置,如下图。

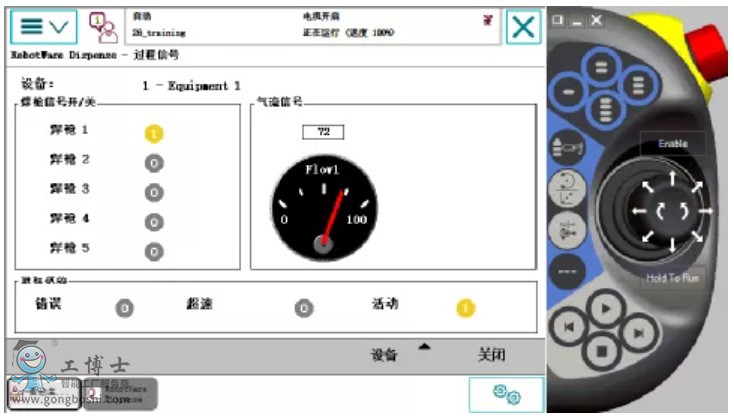
6.goEqu1Guns组信号(5位)表示对设备内的5把胶枪的开关。即在执行DispL\On时,会将对应beaddata中的gunno号置1。
7.下图的焊枪1-5的开关信号关联的是doEqu1Gun1- 5 的DO信号
更多资讯:ABB机器人
