

 QQ
QQ
此工作流程包括:
• 创建系统工作站的选项。 • 导入或创建要使用的对象 • 通过为ABB机器人配件和其他设备寻找*佳位置,优化工作站布局 。
(在大多数情况下,建议您遵循从头至尾的工作流程,即便可以采用其他顺序,也应如此。)
使用系统创建工作站
下表介绍了创建系统工作站的选项。 具体操作步骤请参阅新建第页170。
描述活动 如果要新建包含ABB机器人的工作站以及到基本系统模板的链接,这 是*简单的一种方法。
使用模板系统创建工作站 根据现有系统新建包含一个或多个ABB机器人的工作站。
使用现有系统创建工作站 高级用户可以从头构建工作站,然后向其中添加新系统或现有系 统。 创建不含系统的工作站。

下表介绍了手动启动系统的多种方式。根据您的需要选择相应的操作步骤。
描述活动
重启VC 手动将模型库连接至VC 。
导入ABB机器人工作站组件
下表介绍了导入工作站组件的工作流程。根据您的需要选择相应的操作步骤。
具体操作步骤请参阅导入工作站组件第页81。 描述活动 请参阅机器人系统第页184。
导入ABB机器人模型请参阅导入模型库第页183.导入工具 请参阅ABB模型库第页182.
导入变位机
导入机器人导轨 如果您有要导入设备的CAD模型,
导入该设备。您也可以使用RobotStudio创建一个模型。
导入其他设备 如果您有要导入设备的CAD模型,请参阅导入模型库导入该设备。您也可以使用ABB机器人配件RobotStudio创建一个模型。请参阅机械装置第页88。
ABB机器人的摆放对象和机械装置
下表介绍了如何摆放工作站组件。 描述活动 如果您是为真实工作站创建模型,请先将已知位置的设备摆放好。 然后为不知道其在真实工作站中位置的设备寻找合适的摆放位置。 请参阅摆放物体第页91和设置外轴第页92。摆放物体 将工具安装至机器人。
安装工具 如果当前工作站中使用了导轨,请将ABB机器人安装至导轨。 将ABB机器人安装至导轨 如果当前工作站中使用了变位机,请将工件安装到变位机。
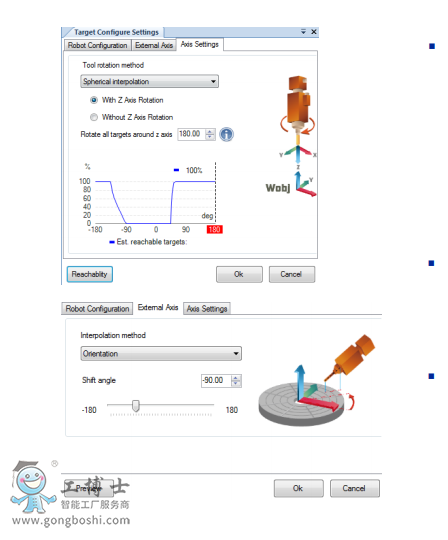
将工件安装到变位机 检测ABB机器人是否能到达工件上的关键点。如果您对机器人到达目 标位置的到达性及姿态满意,您可以对工作站进行进一步的编程。 否则,请继续调整位置,或使用下文中描述的其他工具保证可达性。
更多资讯:ABB机器人配件
