

 QQ
QQ
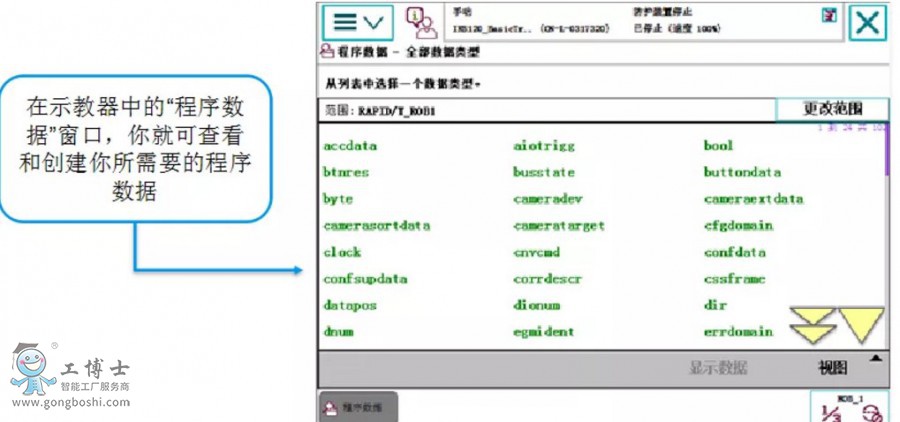
1.变量VAR
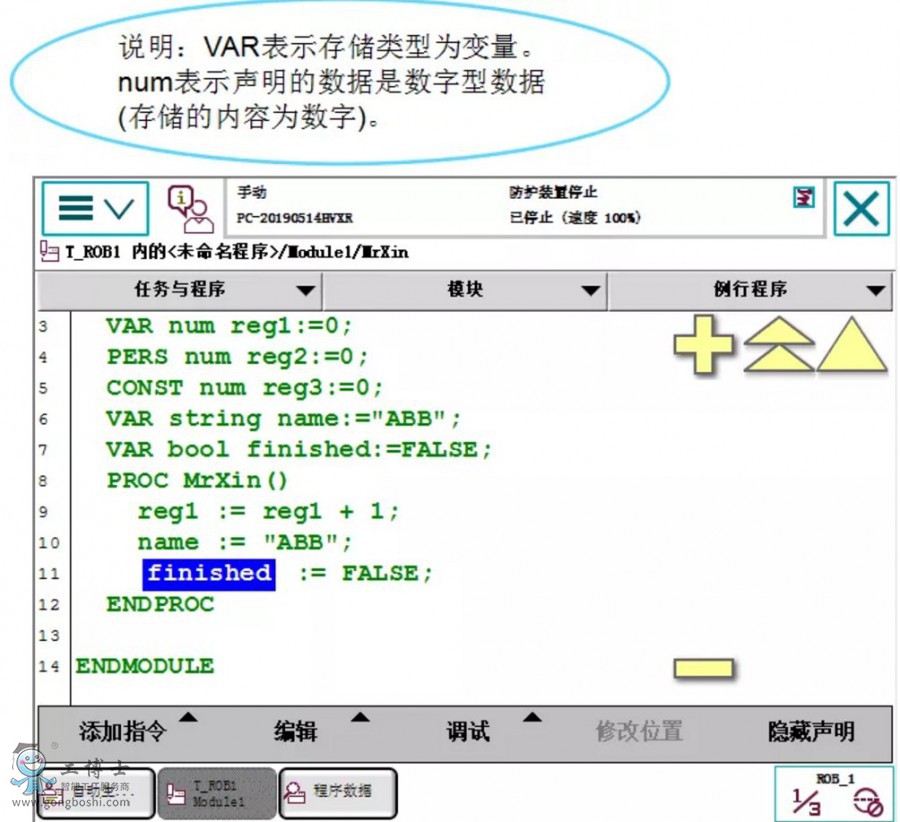
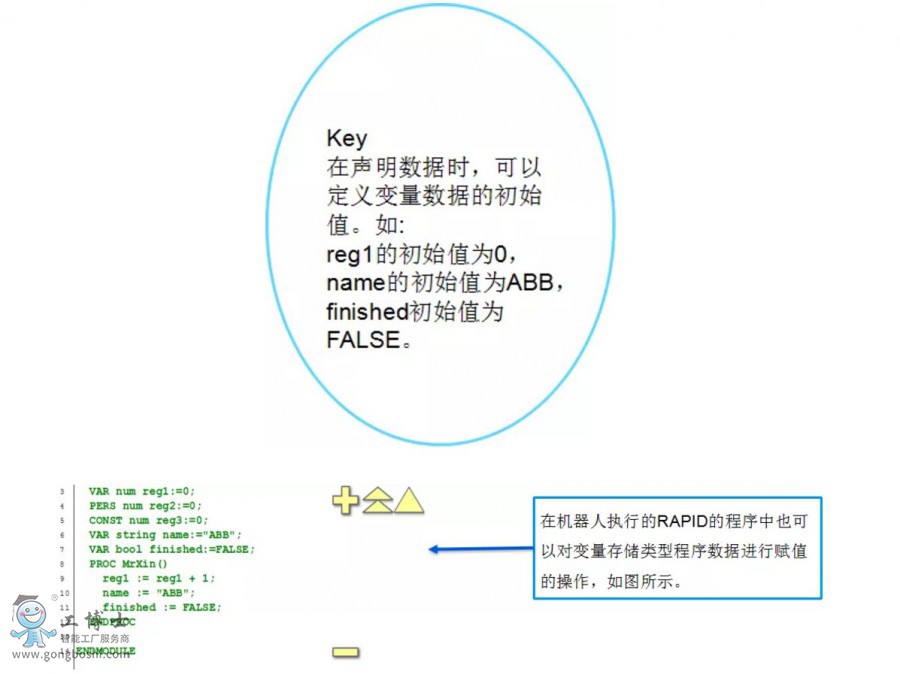
变量型数据在程序执行的过程中和停止时,会保持当前的值。但如果程序指针复位或者机器人控制器重启,数值会恢复为声明变量时赋予的初始值。
举例说明:
VAR num reg1 := 0; 名称为length的变量型数值数据
VAR string name := "ABB"; 名称为name的变量型字符数据
VAR bool finished := FALSE; 名称为finished的变量型布尔量数据。
2.可变量PERS
无论程序的指针如何变化,无论机器人控制器是否重启,可变量型的数据都会保持***后赋予的值。
举例说明 :
PERS num reg2 := 0; 名称为reg1的数值数据
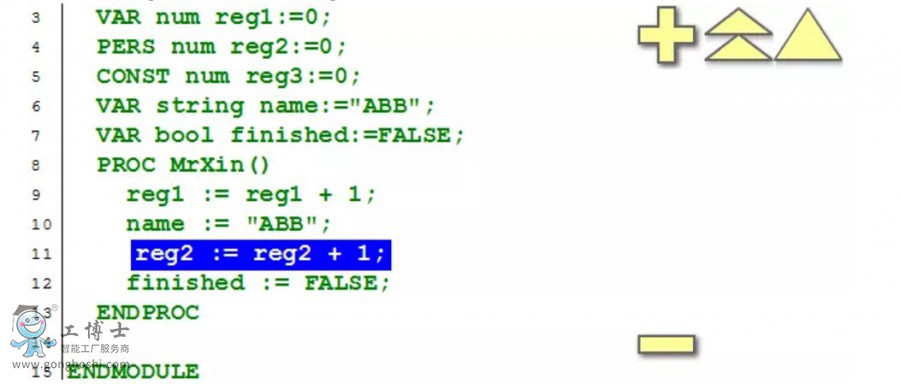
机器人关机或者重启reg2的值依然还是保持为当前的值,可变量PERS这就好比PLC停电保持型的时间计数器具有记忆功能,而变量VAR好比PLC普通型的时间计数器没有记忆功能断电或者关机重启就会恢复默认初始值。
3.常量CONST
常量的特点是在定义时已赋予了数值,并不能在程序中进行修改,只能手动修改。
举例说明 :
常量CONST是一个只读数据,是不能进行赋值的。好比你的Word文档设定为只读后,文档是不能进行修改的。
CONST num reg5:=0;在第14行reg5:=0检查程序后会提示行14错误,并且提示说明赋值目标是只读目标。删除第14行后检查程序就不会报错。
更多资讯:ABB机器人配件
